芝浦工業大学の研究チームが、人間の筋肉の機能にヒントを得て、無人惑星探査車のスリップ状態を検知する革新的なシステムを開発しました。
概要
開発チーム:芝浦工業大学 システム理工学部機械制御システム学科主導教授:飯塚浩二郎教授
研究内容:無人惑星探査車のスリップ状態を検知するシステムの開発
研究のヒント:人間の筋肉が走行状況を検知する機能
掲載誌:Remote Sensing
DOI:https://doi.org/10.3390/rs15174270
研究の背景と必要性
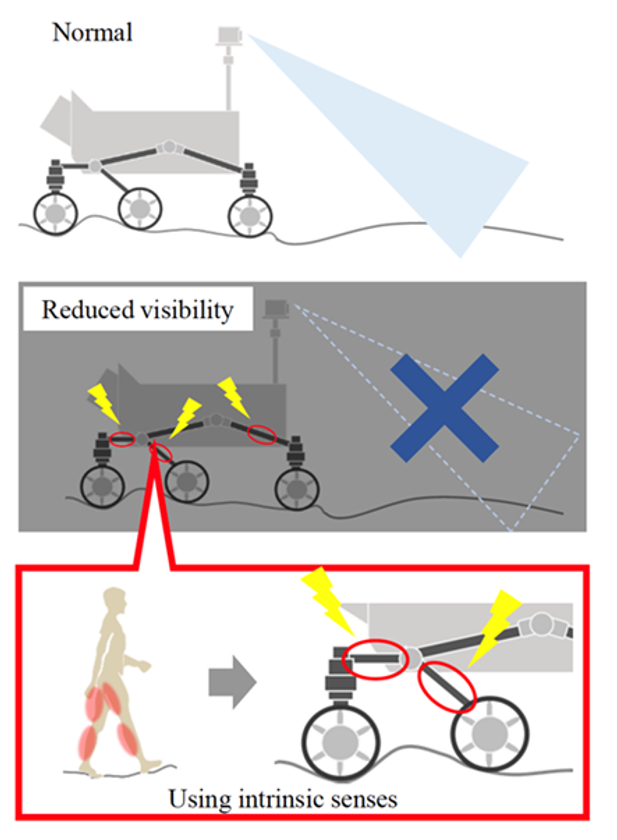
無人惑星探査車はしばしば緩い土地でのスリップに悩まされ、探査任務を遂行する上での障害となっています。NASAの火星探査ローバーなどの例を見ると、天体の表面が提供する過酷な環境はローバーの機動性に大きな挑戦をもたらしていることがわかります。これまでの走行状態検出方法は、主にカメラに依存していましたが、地形の質的特徴の識別には限界があります。人体筋肉の機能を模倣した技術
飯塚教授率いるチームは、この問題に対して、人間の筋肉が走行状態を検出する仕組みに着目しました。筋肉の張力の変化や筋線維の伸張速度を検出することで、ローバーのスリップ状態を効果的に判断することができるようになりました。これにより、ローバーはリアルタイムで適切な姿勢修正を行い、スリップを回避できるようになります。研究の影響と展望
この技術は、無人ローバーの操作の安全性と効率を高めると同時に、生物学的機能を取り入れたセンシング技術の重要性を示しています。このアプローチは、無人航空機や自動運転車の分野においても応用が期待されます。研究の支援
本研究は、科学研究費補助金(JP21K03952)によって支援されました。芝浦工業大学の研究チームが開発した、人体の筋肉機能を模倣した無人惑星探査車のスリップ状態検知システムは、宇宙探査の分野における大きな進歩を示しています。この技術は、将来の無人探査車や他の自動運転車両の安全性と効率性を向上させる可能性を秘めています。
関連リンク
芝浦工業大学公式ウェブサイト:https://www.shibaura-it.ac.jp/
Remote Sensing誌の研究論文:https://doi.org/10.3390/rs15174270





