芝浦工業大学の大谷 拓也准教授と早稲田大学の高西 淳夫教授、そして富士通株式会社が、ロボットの逆運動学計算に量子コンピューターを用いた新手法を開発、実機検証を通じてその効果を確認しました。
概要
詳細:芝浦工業大学の大谷 拓也准教授、早稲田大学の高西 淳夫教授、富士通株式会社開発手法:量子コンピューターを利用したロボットの逆運動学計算
結果:64量子ビットの実機で機能性の確認
論文情報:「Quantum Computation For Robot Posture Optimization」Scientific Reports Nature Portfolio社
URL:https://www.nature.com/srep/
DOI:https://doi.org/10.1038/s41598-025-12109-0
具体的手法と効果
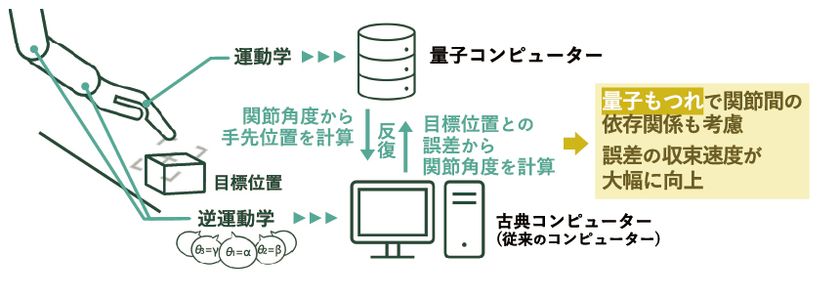
本研究では、複数の関節を持つロボットの逆運動学計算を、量子技術を活用して効率的かつ高精度に解くことに成功しました。親関節の動きが子関節に影響する構造を量子もつれで再現し、従来の手法と比べて必要な計算回数を大幅に削減できました。7個の関節で運動計算を行うのがこれまでの一般的な方法でしたが、量子コンピューターを用いることで、人体の関節数と同じ17個の関節を有する全身多関節のモデルでも計算が可能となりました。
量子もつれの導入とその効果
ペアの一方の量子が変化すると、もう一方も即座に変化する量子もつれを導入することで、逆運動学計算の収束速度と精度が大幅に向上しました。富士通の量子シミュレーターを用いた検証では、従来の手法と比較し、少ない計算回数で最大43%の誤差低減を実現しました。関連リンク
芝浦工業大学:https://www.shibaura-it.ac.jp/早稲田大学:https://www.waseda.jp/top/
富士通株式会社:https://global.fujitsu/ja-jp